Ремонт и обнаружение неисправностей в системах труб, зачастую расположенных под землей, в настоящее время занимает очень много времени. Действующие роботизированные механизмы, использующиеся в промышленности, обладают ограниченными возможностями и не могут действовать автономно, потому и применять их для ремонта и поиска неисправностей в трубах пока никто не решался.
Но команда инженеров компании PEbuzz Cybernetics совместно со специалистами из SINTEF начали работу над проектом, который, возможно, поможет решить данную проблему.
"Мы в настоящее время разрабатываем концепцию навигационной системы, которая позволит роботу ориентироваться ", говорит Йенс Фиелеманн, представитель SINTEF Group, крупнейшей норвежской независимой исследовательской организации. "Данная система должна позволить роботу с помощью встроенных камер передвигаться по заранее запрограммированной карте".
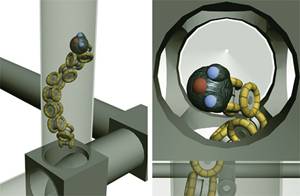
Заранее в ПЗУ робота будет вводиться карта труб и задачи, которые он должен выполнить, в дальнейшем он будет действовать автономно, производя поиск неисправностей или ремонт труб. Перемещаться по трубам он будет с помощью 10 или 11 пар колес, размещенных попарно на отдельных модулях. Подобные модульные роботизированные механизмы уже существуют, инженеры из PEbuzz и SINTEF обещают создать улучшенную модель такого робота, который сможет передвигаться по вертикальным поверхностям труб.
Для проверки соответствию концепции в июле этого года два из десяти совместимых модулей будут протестированы. Разработчики подчеркивают, что проект находится пока на стадии проектирования, но они надеются продемонстрировать действующий прототип робота уже в конце этого года. Предполагается, что он будет изготовлен из алюминия, и длина его составит 1,5 метра.




